
Systemデザイン – スピーカー
(ボブ・マッカーシー氏)

イマーシブサウンド用のスピーカーシステムを設計する方法は無数にあります。
それは、オーディエンスにとっての体験をどのようにするかによって異なります。それは芸術的な決定です。
Spacemap Goを使用したパンには、最低2つのスピーカーと2つのプロセッサー出力が必要です。
それ以外に、SpacemapGoスピーカーシステムには制限がありません。
典型的なスピーカーシステムの設計は、カバレッジのオーバーラップを最小限に抑えてカバレッジを提供し、
各オーディエンスの場所は最小数のソースから相関信号を受信します。
Spacemap Goスピーカーシステムの設計は異なり、各オーディエンスの場所はすべてのスピーカーでカバーされています。
各オーディエンスは、芸術的な欲求に応じて、すべてのスピーカーから無相関の信号を受信できます。
以下のシステム設計の情報は、スピーカーのモデル、場所を選択し、イマーシブSpacemapシステムを目指すためのガイドです。
このイマーシブシステムの目標は、ある音源から別の音源へのスムーズなパンを提供し、
最大数のオーディエンスが観察できるようにして、オーディエンスが球の半分内のどこにでも音源をローカライズできるようにすることです。
この一連の基準を「グラニュラーシステム:粒状系」と呼びます。
他の設計目標では、完全に有効なさまざまなシステム設計方法を使用する場合があります。
ご質問やご意見がございましたら、お問い合わせ
いただくか、Spacemap Go Forumからアイデアを募ってください。
Systemレベル
Bob’s Origami Method A tangible method to determine locations and spacing for loudspeakers.
System Design Roundtable #1, 2021-01-13 Fundamentals of design and methodology, with Spacemap examples.
System Design Roundtable #2, 2021-01-20 Design examples for various room shapes, with Spacemap examples.
System Design Roundtable #3, 2021-01-27 Design examples with balconies and fills, with Spacemap examples.
スピーカーの均一性

Spacemapシステムで使用されるスピーカーは、聴衆の体験に影響します。
スピーカーの、タイプ、指向性、配置、は全体的なパフォーマンスと聴衆の知覚に影響を与えます。
Spacemapシステムのすべての場所で同じモデルのスピーカーが使用され、
それらがすべて適切に機能し同じ周波数特性と位相特性を持っている場合に、
オペレーションの上で同一性または均一性が実現しています。
小さな変動は重要な要素ではありません。
損傷したドライバーや放射位相特性などは大きな要素となります。
適切に機能しているスピーカーから、異なる音響出力特性を持つスピーカーに音がパンニングされると、
音の動きのサウンドイリュージョン効果が妨げられます。
Spacemapシステムで使用されるスピーカーは、周波数特性と位相特性が一致するように調整する必要があります。
Meyer Soundの異なる製品ファミリーから異なるスピーカーモデルを使用する場合は、
Product Integration(Compassソフトウェア)を使用して異なる製品ファミリー間の位相特性を一致させ、EQフィルター(通常はCompassソフトウェアのU-Shaping)を
使用して周波数特性を一致させます。
ルームアコースティック

特定の場所から発せられる音の知覚を維持するには、残響時間が短く、エコーが最小限の部屋が望ましいです。 音響的に残響があり反射する部屋では、音が部屋内の別の場所に定位し、これが望ましい美観となります。
部屋の音響特性を変更するには、通常、反射を強化または減衰するための材料を追加する必要があります。
スピーカーの照準と指向性により、音響反射面に到達する音の量が大幅に変化する可能性があります。
Spacemap Go アプリのインターラクティブ性

Spacemap Goは、GALAXYプロセッサーのサミングマトリックスのクロスポイントレベルを変更する機能を核とするグラフィックインターフェイスです。
iPadインターフェースは、バーチャル的表現を利用して個々の入力がパンニングされる場所を表示します。
Spacemap Go上では完全にバーチャルです。スピーカーがない場合、アプリの表示に関係なく、音の部屋の後方への移動はありません。
現実の物理的な設置では、音源は特定の位置に存在し、Spacemap Goがそれらの間で入力をパンニングできるようにする必要があります。
用語
Lateral System(ラテラルシステム): 部屋の境界に配置されたスピーカーは、リスナーに対して垂直方向には45°以下の比較的低い垂直方向を持つと認識され、つまり側面および背面を囲うような存在です。
Overhead System(オーバーヘッドシステム): リスナーの上方に配置されたスピーカーは、リスナーに対して垂直方向に45°以上の比較的高い垂直方向を持つと認識されます。
360° Fully Granular(フルグラニュラー): 各スピーカーはそれぞれSpacemapノードに相当し、特定の信号チャンネルのサウンドソースとして認識されます。
Coverage Pattern(カバレッジパターン): スピーカーモデルが指向性である周波数の範囲。
これらはより高い周波数であり、ほとんどの場合、モデルに応じて、コンプレッションドライバーとホーンまたはドームツイーターによって再生されます。
モデルによって異なりますが、通常は2 kHz以上です。
In Coverage or Covers(カバレッジまたはカバー内):これらのフレーズは、スピーカーのカバレッジパターンのSPLを指します。
エリアの変動が最も大きいポイントから最も小さいポイントまでの変動が6dB未満の場合、そのエリアは「カバレッジ内」と定義されます。
Loudspeaker Coverage(スピーカーカバレッジ)
グラニュラーSpacemapシステムの設計意図は次のとおりです:
- 各スピーカーはリスニングエリアを最大パーセンテージでカバーします。
- 水平方向のカバレッジを広くすることを強くお勧めします。最小80°で、推奨110°です。
- 横方向のラテラルスピーカーは反対面に届くように設計されており、垂直方向のカバレッジは推奨 50°以下です。
- オーバーヘッドシステムは、垂直方向と水平方向の広いカバレッジのためで、最小80°で、推奨110°です。
MAPP 3Dは、空間、スピーカーの位置をモデル化し、カバレッジを予測するために使用されます。
スピーカー モデル
この設計方法では、広い(水平)カバレッジのスピーカーを使用します。
110°スピーカーのファミリーが推奨されます(現在の製品):LYON-W、LEOPARD、Ultra X-40、Ultra X-20 / 23、UP-4slim、UP-4XP、HMS-12、Ashby-5C / 8C、MM -4XP、MM-4XPD。 80°- 90°スピーカーのファミリーには、わずかに高い密度が必要になる場合があります(現在の製品)
:LYON-M、UPQ-D1 / D3、UPJ-1P、HMS-5 / 10/15 / 15AC。
設計目標を定義
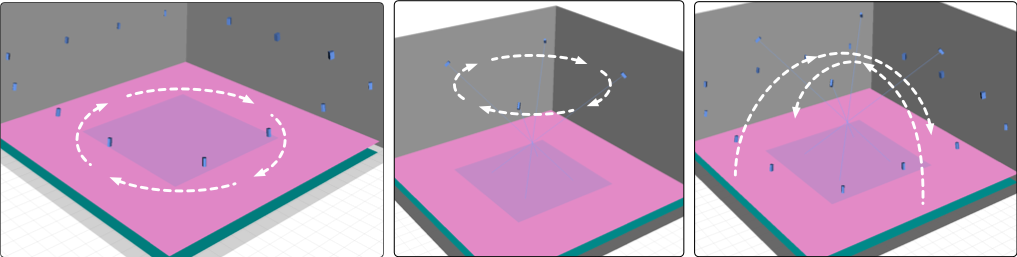
サウンドを連続的に水平方向にPanしますか?その後、ラテラルの360°Fully Granularデザインが必要です。
それぞれのスピーカーの位置は、左下の左側にある輝いて注目の中心になり、チャンスがある星でです。
音を聴衆の上でスムーズにPanさせたい場合は、?下記のオーバーヘッド、360°Fully Granularデザインを使用してください。
音をコーナーから頭上へ、反対側のコーナーへPanしますか?右下にオーバーヘッドとラテラル360°Fully Granularデザインが必要です。
例の設計目標
以下の例では、設計目標は次のとおりです:
- マルチチャンネルメインシステム
- Fully Granular設計のラテラルシステム
- Fully Granularオーバーヘッドシステム
- 低周波システム
デザイン ステップ
- スペースを定義: Loudspeaker Perimeter (スピーカー プリメター:スピーカー境界、Coverage Area(カバレッジエリア)、Go Factor、Go Zone。
- メインシステム:水平方向スペース、高さ、水平方向および垂直方向の基準。
- ラテラルシステム:パワースケール、高さ、水平方向スペース、水平方向および垂直方向の基準。
- オーバーヘッドシステム:パワースケール、位置、高さ、水平方向スペース、水平方向および垂直方向の基準。
- 低域用システム:パワー、配置。
- プロセッシングを必要とするチャンネルをアサイン。
1. スペース定義
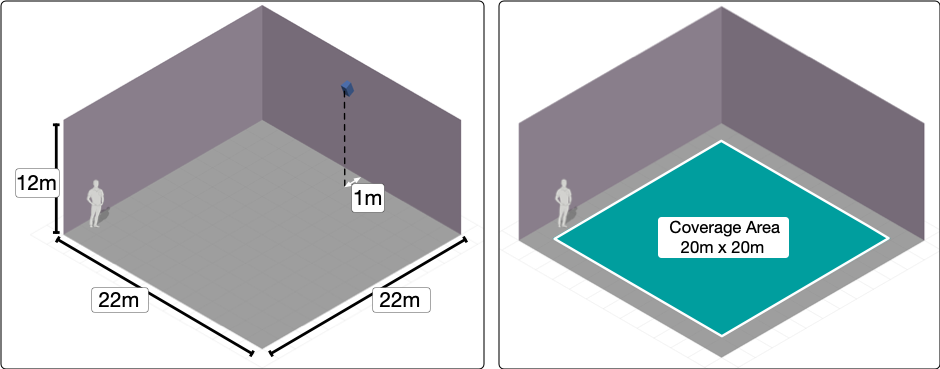
部屋の形はたくさんあります。 設計手順を説明するために、天井の高い(22 m x 22 m、高さ12 m)正方形の快適な部屋を使用します。 これらの設計手順の下に、他の例を示します。
Perimeter(プリメター): 壁とメインスピーカーおよびラテラルスピーカーの取り付け位置の間の距離(1メートル)。
Coverage Area: スピーカーの周囲(20 m x 20 m)内の部屋の面積。
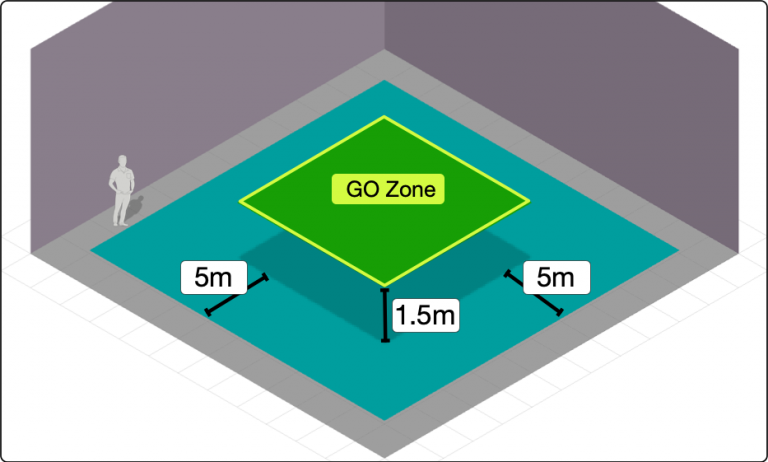
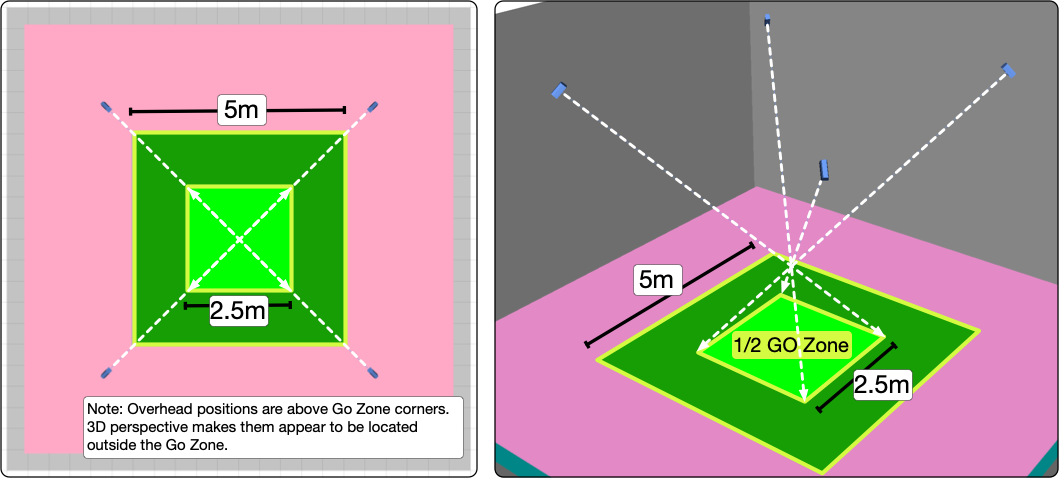
Go Distance: 移動距離:カバレッジエリアの狭い側の距離の1/4(20 m x 0.25 = 5 m)。
Go Zone: すべての側から1 x 「移動距離 (Go Distance)」 (5m) を引き、リスナーの耳の高さ (1.5m) まで上げます。Go Zoneの狭い側は、Go Distanceの2倍 (10m)です。この正方形の部屋では、Go ZoneはGo Distanceの正方形の2倍 (10m×10 m) です。
NOTE: Go ZoneとGo Distanceは、スピーカーの位置を特定するためのスケーラブルなリファレンスを提供し、イマーシブの体験を提供するリスニングエリアではありません。 スピーカーの位置とスピーカーの指向性が最適である場合、イマーシブ領域はスピーカーのパラメーターとほぼ同じ大きさにすることができます。
2. メインスピーカーシステム
この例の設計目標を達成するには、メインスピーカーの垂直方向のカバレッジを狭くし、水平方向のカバレッジを広くする必要があります。 指向性を超えて、帯域幅とSPLは必要な信号を再生する必要がありますが、スピーカーの機能を考慮する必要があります。
メインシステムの水平方向の間隔 :
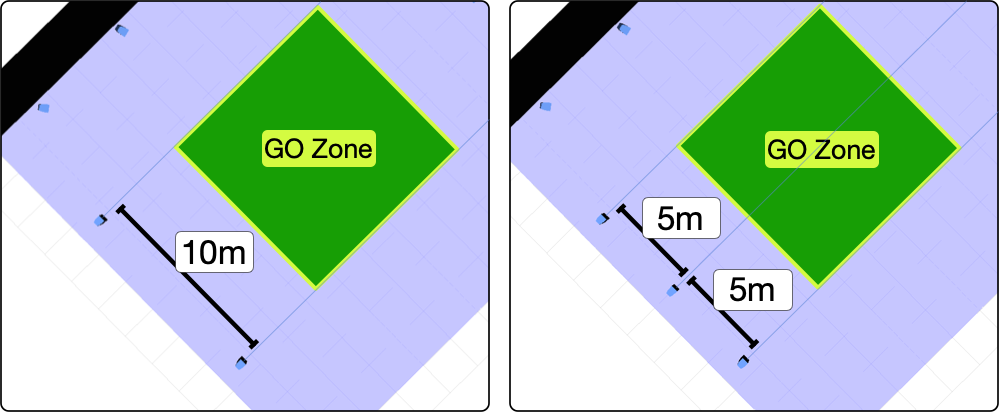
Go Distanceの2倍の長さ (10m) になるようにスピーカーを広げます。
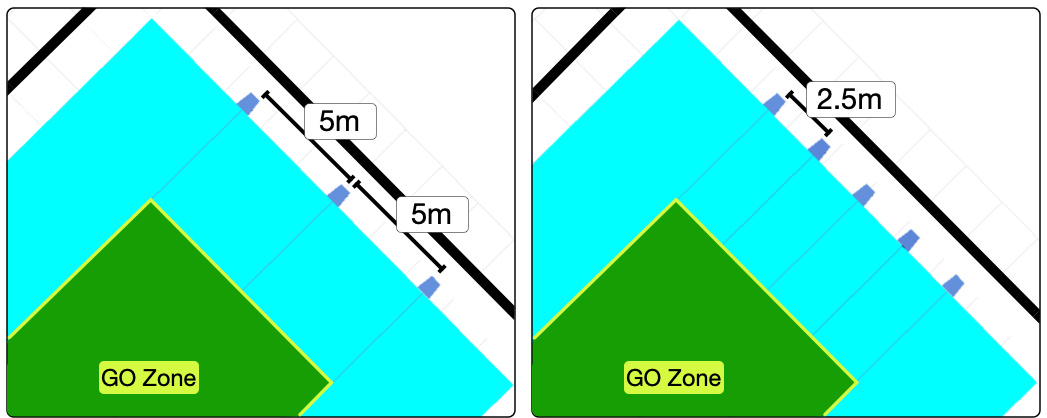
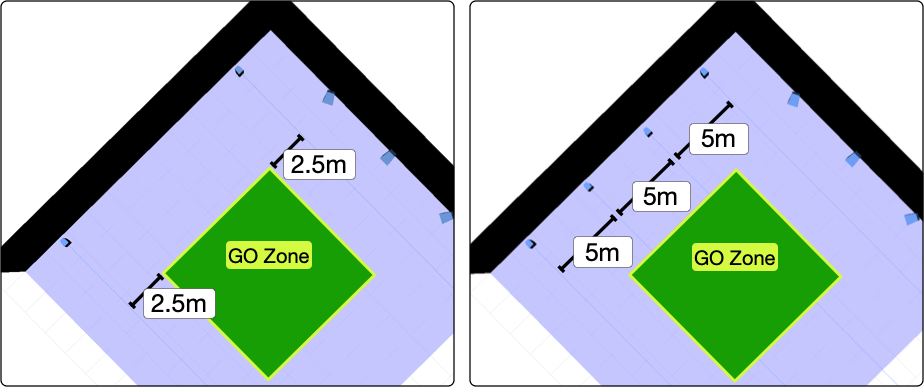
例:3メインシナリオ – メインを水平に広げて2 x Go Distance (10 m)の長さ、5mの水平間隔を確保します。 外側のメインは、Go Zoneの端と一致しています。
例:5メインシナリオ–メインを水平に広げて2 x Go Distance (10 m)の長さ、2.5mの水平間隔を確保します。
例:高いSPLモデルfffをプライマリーの左/右アンカーとして使用し、低いSPLモデルをセカンダリー位置で使用する場合:スピーカーを水平に広げて、2 x Go Distance (10 m)の長さを確保します。 左/右アンカーには、外側の位置または2番目と4番目の位置を使用します。
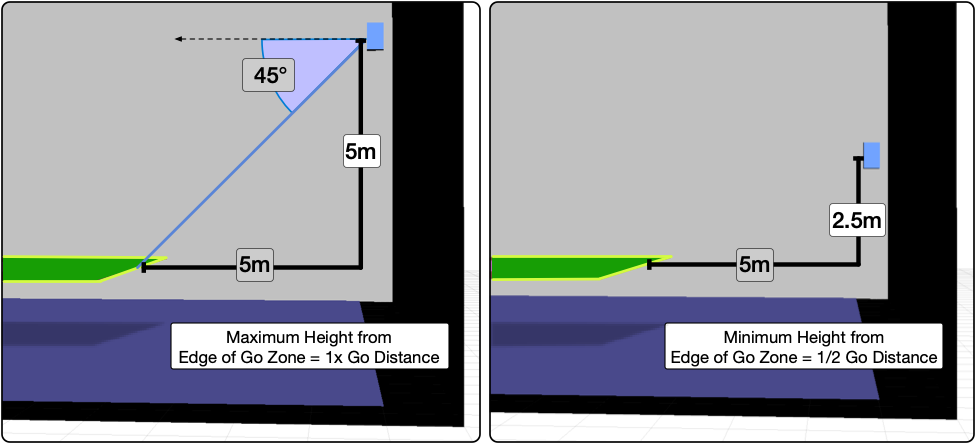
最大:Go Zoneから1 Go Distance(5 m)、Go Zoneの最も近いエッジまで45°未満のダウンチルト。
最小:Go Zone (2.5 m)から1/2 Go Distance。
通常、最大の高さで最も均一なカバレッジが得られます。
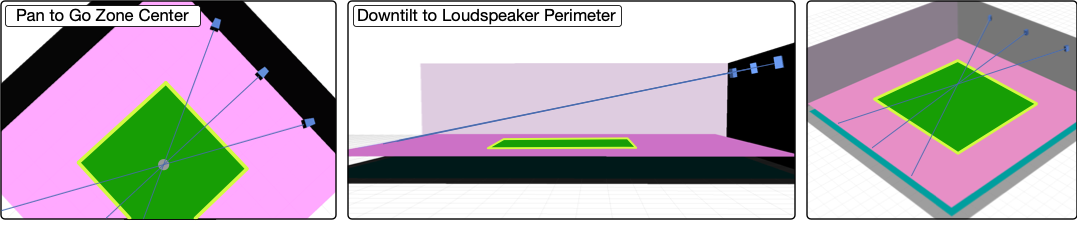
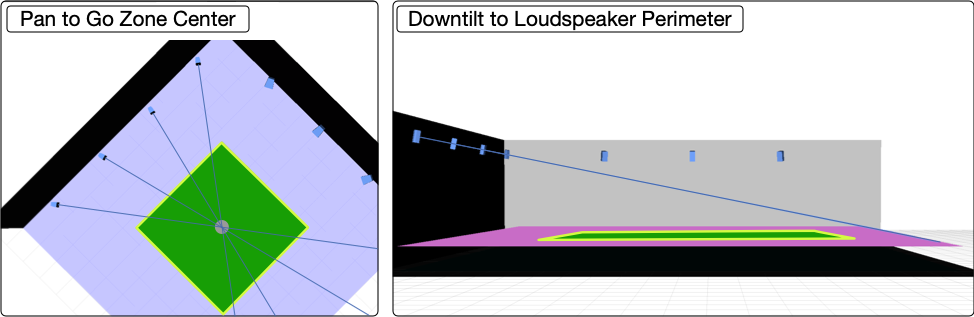
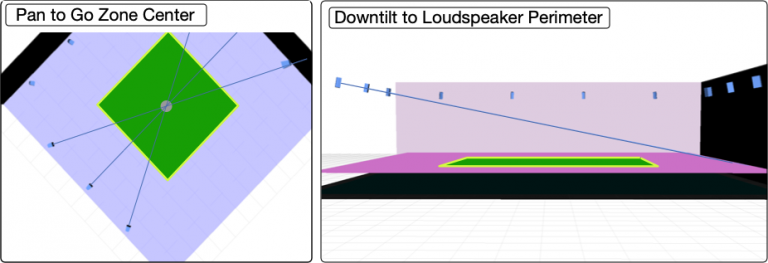
メンテナンスシステムの目的:
Go Zoneの中央にPan (水平) します。
反対側のスピーカー周囲に (垂直に) 傾けます。
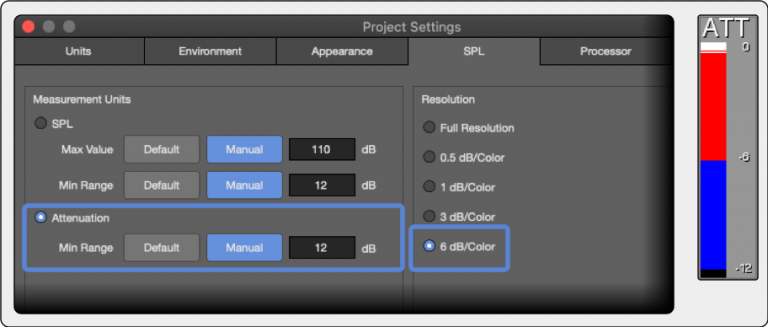
スピーカーのカバレッジの検証を簡略化する1つの方法は、MAPP 3DでSPLの基本設定を調整することです:
- カバレッジを識別しやすくするには、FILE>PROJECT SETTINGS, SPL Tabの環境設定をATTENUATIONモード (範囲=12 dB、6 dB/color) に変更します。
- Prediction Parametersを1 Octave, 4 kHzに設定します。この周波数範囲は、ほとんどのラウドスピーカーモデルの高周波数カバレッジを表しています。
- 赤で示した予測データは0~6 dBの減衰を表しており、これを「in coverage」と呼びます。Go Zoneは、完全に赤であるか、非常に近い色である必要があります。
理想的には、各スピーカーは各聴衆の場所に同じカバレッジを提供します。
それは完全には不可能なので、私たちはその目標に向かって取り組んでいます。
Go Zoneの外への流出は素晴らしいことです! ただし、リスナーの高さより上の壁がカバー範囲内にある場合は、パターンが狭いスピーカーモデルを検討してください。
スピーカーモデルがGo Zoneで75%未満のカバレッジ(相対、0〜6 dB)を提供する場合は、別のモデルを検討してください。
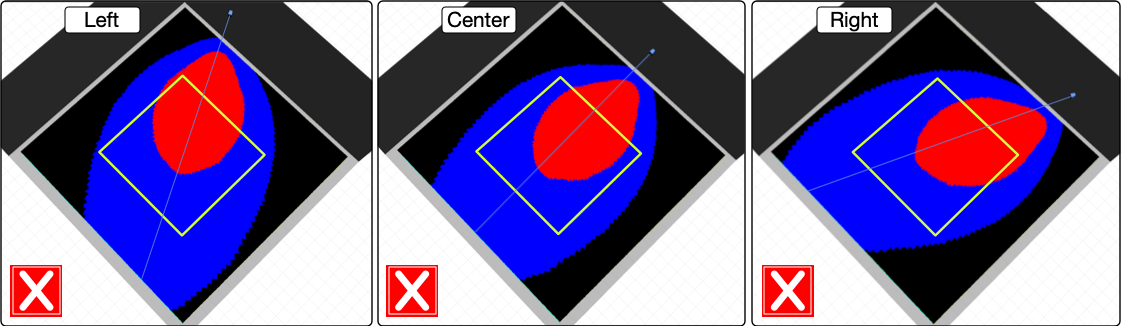
Ultra X-40(垂直110°x水平50°)は、最大高さ(6.5 m、リスナーの高さ1.5 m + Go Distance 5 m)で、このスペースの各メイン位置から均一なカバレッジを提供します。
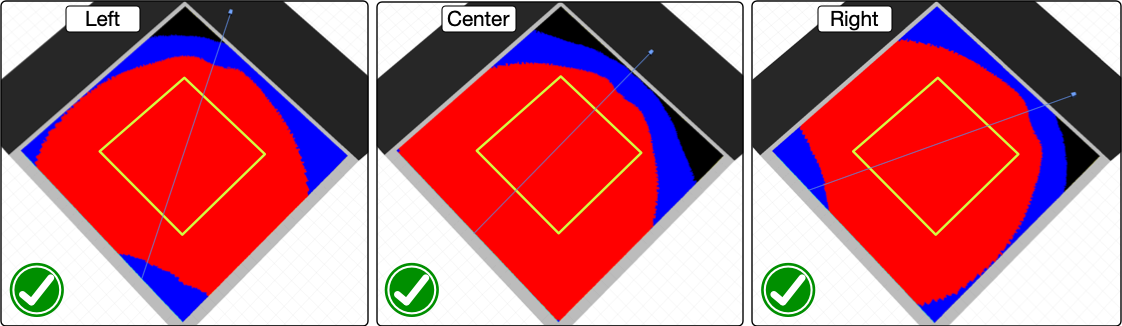
下では、ホーンが回転しており(水平50°x垂直110°)、Go Zoneのカバレッジが不十分です。
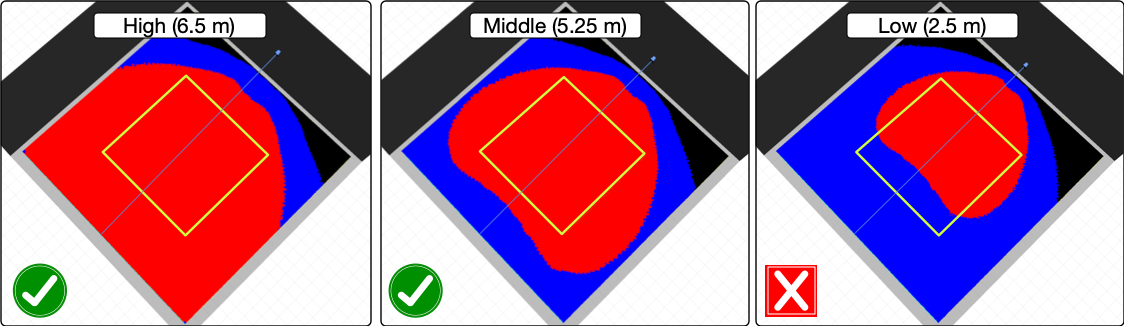
以下では、高さを最大高さから最小高さまで変化させます。 最小の高さ(右)では、Go Zoneが75%覆われている可能性がありますが、最適ではありません。
3. ラテラルシステム
Lateral System – Power Scaling: ラテラルシステム – パワースケーリング:Go Zoneのスピーカーの最大SPL出力は、相対的なパワーニーズによって異なります。 それは創造的なニーズに基づいて決定されます – どのサウンドをどの最大レベルで再生する必要がありますか? サラウンドがメインと同じレベルで信号を再生する必要がある場合は、同じパワースケールが必要です。 サラウンドがメインを補うだけでよい場合は、必要なSPLに応じて、パワースケールを6〜12dB以上小さくすることができます。
例1:Leopard メイン – 等しい電力 = Ultra X-40サラウンド、削減された電力 = Ultra X-20
例2:Ultra X-40メイン – 等しい電力 = Ultra X-20サラウンド、削減された電力 = UPJ-1P
Lateral System – Height: ラテラルシステム–高さ: (メインシステムと同じ)
最大:Go Zone(1.5 m)から1 Go Distance(5 m)、Go Zoneの最も近いエッジまで45°未満のダウンチルト。
最小:Go Zone(1.5m)から1/2 Go Distance(2.5m)。
Lateral System, Sides – Horizontal Spacing: ラテラル (横方向)システム、サイド–水平方向の間隔:
Go Zone (5 m / 2 = 2.5 m)を超えて最初と最後のサイドサラウンド1/2 Go Distanceを見つけます。
サイドサラウンドの公称間隔は、Go Distance(5 m)です。 最初と最後のサイドサラウンドの間を、1x Go Distanceを超えないように等間隔で埋めます。
Lateral System, Rear – Horizontal Spacing: ラテラルシステム、リア–水平方向の間隔:
Go Zone(2x Go Distance)の端にある最初と最後のリアサラウンドを見つけます。
リアサラウンドの公称間隔はGo Distance (5 m)です。 最初と最後のリアサラウンドの間を等間隔で埋めます。 1x Go Distanceを超えないでください。
Lateral System – Aiming: ラテラルシステム – 目標:(メインシステムと同じ)
Go Zoneの中央にPan(水平)
反対側のスピーカーの周囲に(垂直に)傾けます。
NOTE: シネマシリーズのMeyer HMSモデルの中心線は、音響出力の中心とわずかに異なります。HMS-15およびHMS-10は2°低く、HMS-5は2°高くなります。
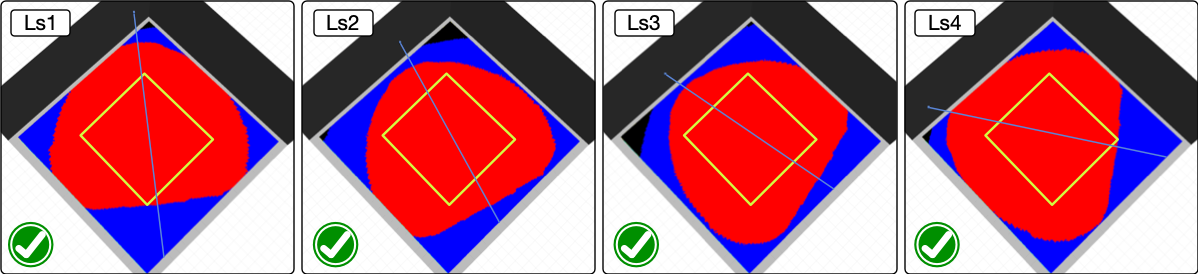
ラテラルカバレッジ検証
理想的には、各スピーカーが空間全体をカバーします。
それは実用的ではないため、私たちは達成可能な結果に焦点を合わせています。
ターゲットはGo Zoneですが、リスニングの高さより上の壁をカバーせずに、スペース全体をカバーする必要があります。
スピーカーモデルがGo Zoneで75%未満のカバレッジ(相対0 dB – 6 dB)を提供する場合は、別のモデルを検討してください。
最大高さ(6 m)のUltra X-20(垂直110°x水平50°)は、このスペースの各側面位置からGo Zoneを均一にカバーします。
ただし、このモデルはGo Zoneをはるかに超えてカバーしていません。
4. Overhead System
Overhead System – Power Scaling: オーバーヘッドシステム – パワースケーリング:
Go Zoneのスピーカーの最大SPL出力は、相対的なパワーニーズによって異なります。オーバーヘッドがメインと同じレベルで信号を再生する必要がある場合、それらは等しいパワースケールを持っている必要があります。オーバーヘッドがメインを補うだけでよい場合は、電力スケールを6〜12dB下げることができます。
例1:Leopard メイン – 等しい電力 = Ultra X-40サラウンド、削減された電力 = Ultra X-20 例2:Ultra X-40メイン – 等しい電力 = Ultra X-20サラウンド、削減された電力 = UPJ-1P
Overhead System – Height: オーバーヘッドシステム – 高さ
最大:Go Zoneから2倍のGo Distance(10 m)
最小:Go Zoneから1xGo Distance(5 m)
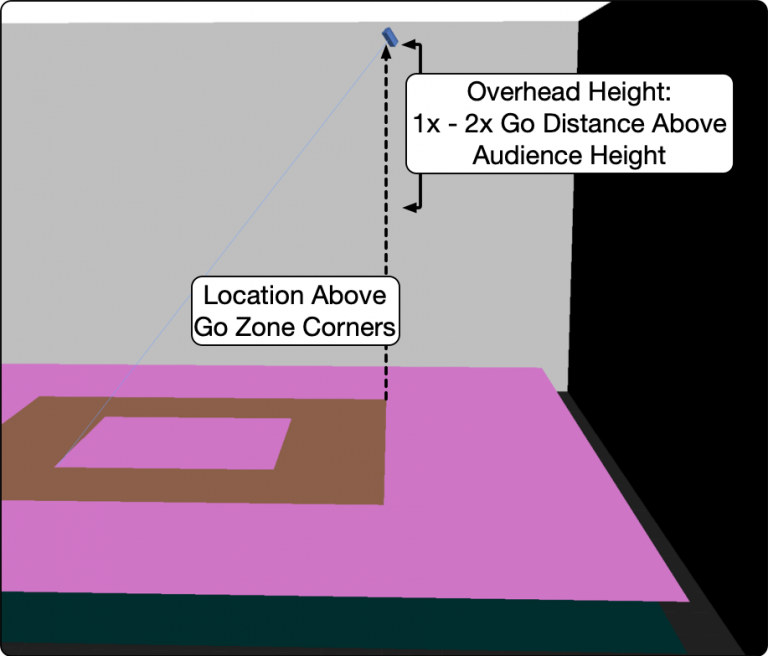
Overhead System – Horizontal Spacing: オーバーヘッドシステム – 水平間隔スケーリング:
Go Zoneのコーナーの上にスピーカーを配置します。長方形の部屋の長い側で、Go Zoneのコーナー間の距離が1倍と2倍のGo Distancesの間にある場合は、コーナー間にスピーカーを追加することを検討してください。距離が2 x Go Distances以上の場合は、スピーカーの位置を1 x Go Distancesの間隔で等間隔に追加します。
Overhead System – Aiming: オーバーヘッドシステム – 目的:
Go Zoneの中央をPan(水平)
Go Zoneの中心を超えて1 / 2 Go Distanceまで(垂直)傾けます。
2. メインスピーカーシステム
Low-Frequency Power Scaling: 低周波数パワースケーリング:
サブウーファーの最大SPL出力は、中高スピーカーのSPL機能と比較した場合、低周波数での相対的なパワーニーズに依存します。
通常、メインのmid-highシステムで使用されるサブウーファーは、mid-highモデルと少なくとも同じ帯域内SPLを再生できますが、
通常は6〜12dB以上です。ラテラルおよびオーバーヘッドシステムで使用されるサブウーファーは通常、
使用される中高モデルでスケーリングされますが、予想されるコンテンツと最大SPLニーズに応じて、
必要ない場合や、過度に指定される場合もあります。
Low-Frequency Locations: 低周波数の場所:
メインサブウーファーの場合、基準、オプション、および場所は、一般的なシステムと同じです。
ラテラルシステムとオーバーヘッドシステムの場合、意図した再生信号が何であり、これらの場所から再生する必要がある音量を理解することが重要です。
低レベルの大気コンテンツを再現するには、各側壁にある単一の低電力サブで十分な可能性があります。
部屋の中を歩く巨大な生き物の足音を再現するには、メインシステムと同じくらい多くの位置とサブパワーが必要です。
6. 信号プロセッシングチャンネルのアサイン
システムの最適化
設計例
Systemレベル
Rectangular Rooms
Round Rooms
Rectangle with raked seating
Rectangle with raked seating and balcony
Rectangle with raked seating and multiple balconies
Flat Floor vs. Raked Seating
個人的なサポートが必要な場合は、meyersound.com/contactにアクセスしTechnical Supportを選択しサポート用フォームにてご連絡ください。




